Here we derive equations of rotational motion when angular acceleration is constant. It means the equations we derive no longer work if the angular acceleration is not constant. You can also check the equations of straight-line motion with constant acceleration to find the analogy between linear and rotational motion of a particle.
Here we consider a particle is moving in a circle about a fixed point \(O\) (its centre). The motion of the particle between points \(p_1\) and \(p_2\) is shown in Figure 1.
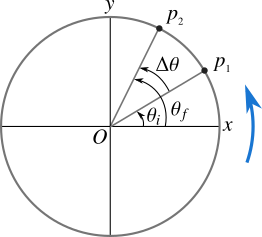
Let initial angular velocity at point \(p_1\) be \(\omega_i\) and final angular velocity at point \(p_2\) be \(\omega_f\). The particle takes time \(t\) to move from the point \(p_1\) to the point \(p_2\) in anti-clockwise direction. The first thing to do is to know the relationship between initial angular velocity, final angular velocity and angular acceleration which you know as \(\alpha = \frac{{{\omega _f} - {\omega _i}}}{t}\). Hence you can write:
\[{\omega _f} = {\omega _i} + \alpha t \tag{1} \label{1}\]
The next step is to find the average angular velocity. If the angular acceleration is constant, the average angular velocity between initial angular velocity \(\omega_i\) and final angular velocity \(\omega_f\) is,
\[{\omega _{{\rm{av}}}} = \frac{{{\omega _i} + {\omega _f}}}{2} \tag{2} \label{2}\]
Again if \(\theta_\text{i}\) is the initial angular displacement at the point \(p_1\) and \(\theta_\text{f}\) is the final angular displacement at the point \(p_2\), the average angular velocity during the time \(t\) is
\[{\omega _{{\rm{av}}}} = \frac{{{\theta _f} - {\theta _i}}}{t} \tag{3} \label{3}\]
From Eqs.\eqref{2} and \eqref{3} you can write \(\frac{{{\omega _i} + {\omega _f}}}{2} = \frac{{{\theta _f} - {\theta _i}}}{t}\), and putting the value of \(\omega_f\) from Eq. \eqref{1} in \(\frac{{{\omega _i} + {\omega _f}}}{2} = \frac{{{\theta _f} - {\theta _i}}}{t}\) and simplifying we get,
\[{\theta _f} - {\theta _i} = \theta = {\omega _i}t + \frac{1}{2}\alpha {t^2} \tag{4} \label{4}\]
Another important equation can be derived by putting the value of \(t\) from Eq. \eqref{1} which is \(t = \frac{{{\omega _f} - {\omega _i}}}{\alpha }\) in Eq. \eqref{4}. After simplifying you can get:
\[\omega _f^2 = \omega _i^2 + 2\alpha \theta \tag{5} \label{5}\]
One last approach is that you can write \(\frac{{{\omega _i} + {\omega _f}}}{2} = \frac{{{\theta _f} - {\theta _i}}}{t}\) using Eqs. \eqref{2} and \eqref{3} and hence,
\[{\theta _f} - {\theta_i} = \theta = \left( {\frac{{{\omega _i} + {\omega _f}}}{2}} \right)t \tag{6} \label{6}\]
Here we derived four important equations for rotational motion for constant angular acceleration. You should not tempt to use these equations in those problems where angular acceleration is not constant. The equations we derived here are Eq. \eqref{1}, Eq. \eqref{4}, Eq. \eqref{5} and Eq. \eqref{6}. You should know these equations in problems involving constant angular acceleration.